| Föregående ämne :: Nästa ämne |
| Författare |
Meddelande |
sx3
MuttroSpammo

Registreringsdatum: 17 februari 2011
Inlägg: 2930
|
|
| Till överst på sidan |
|
 |
Toomuch
Spambot

Registreringsdatum: 13 oktober 2006
Inlägg: 6555
Ort: Crimevillage
|
 Postat: 14 jan 2019 21:47:04 Rubrik: Postat: 14 jan 2019 21:47:04 Rubrik: |
 |
|
Jaa. den där tråden har Per skrivit i någon gång i tiden..
Verkar som folk va mer aktiva med den här maskin för tio år sen..
Efter lite klurande så förstår man ju att den mekaniska givaren gör någonting vid verktygsbyte då karusellen då rör sig upp och ner då fjäderbrickorna komprimeras..
Att lägga till på kolla upp listan kanske är att se vad den sista givaren gör.. tror ju att den siktar neråt men vem vet. kanske koppla in och testa den.
|
|
| Till överst på sidan |
|
|
wrep
The Evil Admin

Registreringsdatum: 10 oktober 2006
Inlägg: 9793
Ort: Sorunda
|
| Postat: 15 jan 2019 00:19:45 Rubrik: |
|
|
| Toomuch skrev: | Det end Jag tycker är synd att då bränner man skeppet 5e axel möjligheten.
Tex hur sårt det skulle vara att köra spindeln i stället för att frilägga en step axel. där är det ju kontinuerligt tänker jag.. |
Den klarar väl 6 axlar? Eller är det så att spindelmotorn numera lägger beslag på den 6:e?
_________________
// Per |
|
| Till överst på sidan |
|
|
sx3
MuttroSpammo
Registreringsdatum: 17 februari 2011
Inlägg: 2930
|
| Postat: 15 jan 2019 10:47:14 Rubrik: |
|
|
Ja, Spindeln tar en motor output idag, step/dir.
Jag kollade lite närmare på OB alternativet igår och jag har väl fått lite hum på upplägget för att få till det efter att ha korsläst manualer till höger/vänster, det är dock rätt invecklat och man lär finta bort sig några gånger på vägen.
Det finns dock inte några färdiga script att snegla på, varken officiella eller eller script som andra användare har skrivit, folk är väldigt skygga med att dela med sig.
Man måste in och joxxa en del i GUI't utöver all kod som skall skrivas.
Den största tiden hamnar ju på efterforskning och läsa in sig, två kvällar och man vet fortfarande inte hur det går till på riktigt så lär man inte vara i mål i närtid.
Jag tror du får maila din DM4400 Profil, så får jag peta i den på kvällar.
Åker ju dock till Spanien i helgen, så det är ju ingen jättepanik.
|
|
| Till överst på sidan |
|
|
sx3
MuttroSpammo
Registreringsdatum: 17 februari 2011
Inlägg: 2930
|
| Postat: 24 jan 2019 23:22:54 Rubrik: |
|
|
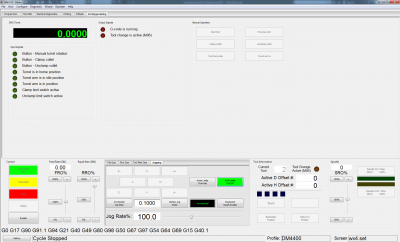
Första utkastet för GUI-delen av verktygsväxling, la den som egen huvudflik.
Saknas lite ingångar/utgångar, men det får man väl plocka på vart eftersom man mappar upp dessa.
Det är nog bra att kunna samla alla in/utgångar och knappar som berör på ett och samma ställe till en början, sen får man väl banta och stuva om, ifall man inte gillade upplägget.
DRO'n kommer till en början att visa antal steg i encodern eller vad det är, det får man scripta om till antal grader sen när man har koll på hur många steg 1 varv på karusellen är.
Just nu är det bara följande av input signaler som är mappade (av förklarliga skäl)
- Turret is in home position (hade även velat ha indikering på om axeln är homad, men det gick inte att välja för OB-axlarna)
- Button - Manual turret rotation
Båda Outputs skall fungera, det är Mach-interna signaler.
Det finns en liten chans att Next/previous kan fungera på något vis.. Troligtvis inte rätt, men det får man väl pilla lite med när man förstått hur OB axlarna verkligen går. Denna ruta med knappar blir blockerad när man kör ett program eller är disablad, så man inte råkar trycka på något.
I övrigt är det sjukt mycket pillande i GUI editorn.
|
Skärmklipp.PNG: 141.24 KB , Visad 263 Gånger, |
|
|
| Till överst på sidan |
|
|
sx3
MuttroSpammo
Registreringsdatum: 17 februari 2011
Inlägg: 2930
|
| Postat: 25 jan 2019 22:50:18 Rubrik: |
|
|
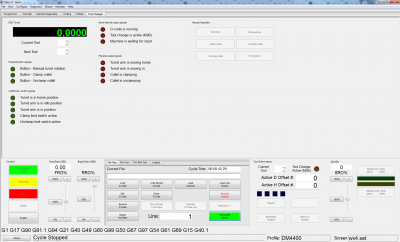
Lite ändrat upplägg och kompletterat med några lampor.
Saknas det några in/utgångar som kan vara intressanta att se medan utvecklar verktygsväxlaren?
Nu är det ba fräsa klart blocket så vi kommer vidare 
|
Skärmklipp.PNG: 171.76 KB , Visad 356 Gånger, |
|
|
| Till överst på sidan |
|
|
sx3
MuttroSpammo
Registreringsdatum: 17 februari 2011
Inlägg: 2930
|
| Postat: 04 feb 2019 16:31:51 Rubrik: |
|
|
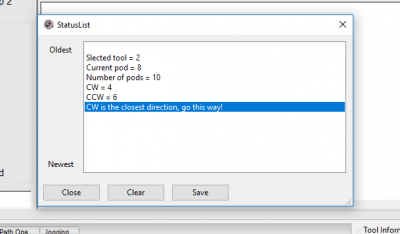
Alla är ju egentligen rörande överrens om att man inte skall lägga vikt vid att få karusellen att gå närmsta vägen till nästa verktyg. Men vafan, något inom mig tyckte att det är klart det skall det! Skrivit lite testkod som spottar ut resultet i felhistoriken. Det verkar funka, den vet närmsta vägen till nästa verktyg. Inte bara det, även hur många Pods bort den är, så det är bara att det gånger den incrementella distansen vi redan vet och skicka iväg karusellen dit.
Dock skulle man vilja ha en induktivgivare för att veta om det ligger ett verktyg i hållaren samt även en givare i låsmekanismen för att veta om det sitter ett verktyg i chucken, då har man ju iaf en sportmössa att undvika kollisioner i onödan.
| Kod: | mInst = mc.mcGetInstance()
local SelectedTool = 10 --Detta är dit vi vill flytta karusellen
local PodNumber = 1 --Denna plats står karusellen i just nu
local NumberOfPods = 10 --Antal platser i karusellen
local ClockwiseDistance = ((SelectedTool - PodNumber) % NumberOfPods)
local CounterClockwiseDistance = (NumberOfPods - ClockwiseDistance)
mc.mcCntlSetLastError(mInst, "Slected tool = "..tonumber(SelectedTool))
mc.mcCntlSetLastError(mInst, "Current pod = "..tonumber(PodNumber))
mc.mcCntlSetLastError(mInst, "Number of pods = "..tonumber(NumberOfPods))
mc.mcCntlSetLastError(mInst, "CW = "..tonumber(ClockwiseDistance))
mc.mcCntlSetLastError(mInst, "CCW = "..tonumber(CounterClockwiseDistance))
if ClockwiseDistance < CounterClockwiseDistance
then
mc.mcCntlSetLastError(mInst, "CW is the closest direction, go this way!")
else
mc.mcCntlSetLastError(mInst, "CCW is the closest direction, don't go CW, you will loose time!")
end |

|
vvx1.PNG: 45.25 KB , Visad 207 Gånger, |
|
vvx2.PNG: 13.22 KB , Visad 221 Gånger, |
|
|
| Till överst på sidan |
|
|
sx3
MuttroSpammo
Registreringsdatum: 17 februari 2011
Inlägg: 2930
|
| Postat: 04 feb 2019 18:34:52 Rubrik: |
|
|
Och här besannas våra misstankar, ESS kan i nuläget inte homa OB axlarna
| Citat: | Hi,
I am assuming that this is Mach4.
Yes, we *should* home OB motors.
No, the code currently skips homing them.
I will try and add in the required code to do that this week (although it may not happen this week - I need to complete THC first).
Andy |
|
|
| Till överst på sidan |
|
|
wrep
The Evil Admin
Registreringsdatum: 10 oktober 2006
Inlägg: 9793
Ort: Sorunda
|
| Postat: 04 feb 2019 21:11:16 Rubrik: |
|
|
Vad är det han säger? Jag fattar inte va han menar 
_________________
// Per |
|
| Till överst på sidan |
|
|
sx3
MuttroSpammo
Registreringsdatum: 17 februari 2011
Inlägg: 2930
|
| Postat: 04 feb 2019 21:15:03 Rubrik: |
|
|
Han menar väl att ESS'en borde och skall kunna homa fler axlar än XYZABC, men att dom antagligen avkommenterat dom styckena i sin kod så att sekvensen inte körs, men att han skall kolla på det och lägga till det som saknas till oss.
Man får ju lite dinky-toy varning av ESS, är det ingen annan som kört OB axlar verkligen? Det som talar emot dinky-toy är att man får snabb respons och att dom är hjälpsamma, även om det kan ta en stund att få ordning påt.
På annat håll har jag tagit reda på att det inte går att manupulera maskinkordinaterna på annat sätt än en regelrätt home sekvens, vår DRO går således inte att nolla, finns inget API call för det.
Nu är ju DRO'n egentligen bara "nice to have", den fyller inget syfte.
Ursprungsfrågan från mig var:
| Citat: | Can ESS handle homing sequence of OB axises?
We have set up an OB axis, just the same as with the XYZA axis, with home switch, and set the home order and so. But during the homing sequece the OB axis refuses to start moving.
If we move all the parameters to a cordinated axis, like B or C, it will home properly. But as soon as set as OB, it refuses.
Makes me think that ESS can't handle homing of OB axis?
Mach on the other hand have inputs for "motor home" switches up to many many motors, hence thinking the problem isn't within Mach?
As for now, we can jog the OB to home position with a script, but how can I reset the machine coordinates for the OB? I have a DRO assigned for the OB that I would want to Zero, with a API call in a script.
Can ESS do this somehow? |
|
|
| Till överst på sidan |
|
|
|

